
CombatCog
Distributed reasoning for sensorized multi-domain battlefields and dual-use adaptive operations


Our current research focuses on solution architectures based on real-time distributed complex reasoning in sensorized multi-domain environments.
The first field of application is defence.
More precisely, the support of adaptive and autonomous military operations in sensorized battlefields where information, decision-making, command, control, and action must be coordinated under extreme uncertainty and time pressure.
But the same architecture also has important dual-use applications:
Environmental monitoring.
Critical infrastructure supervision.
Predictive maintenance.
Energy networks.
Multimodal transport systems.
Large-scale ecological protection.
Disaster prevention.
Early warning systems.
The same underlying problem appears in all these domains.
We must deploy distributed sensing, distributed cognition, and distributed decision-support systems in complex environments that change continuously.
That is the conceptual space of CombatCog.
From sensorized battlefields to cognitive operational environments
The intelligent battlefield is not a new idea.
Military organizations have long sought to use distributed sensors to improve situational awareness, detect enemy movement, protect forces, support targeting, and reduce uncertainty in operational planning.
One of the early reference systems was REMBASS, the Remotely Monitored Battlefield Sensor System. Its purpose was to deploy unattended sensors capable of detecting, classifying, and reporting activity in a battlefield area.
REMBASS and later unattended ground sensor systems represented an important step toward persistent battlefield sensing. They showed that the battlefield could be partially instrumented, remotely monitored, and connected to command and control structures.
But the current transformation goes much further.
The decisive change is not only better sensors.
It is the convergence of AI, microsensors, autonomous platforms, pervasive communications, edge computing, C4ISR systems, and distributed reasoning architectures.
The future battlefield will not only be sensorized.
It will be cognitive.

The core idea of CombatCog
CombatCog can be understood as a conceptual architecture for distributed reasoning in multi-domain sensorized environments.
Its central hypothesis is simple.
In future operational environments, intelligence cannot reside only in a central command node.
It must be distributed across the environment.
Sensors, agents, platforms, command systems, analysts, autonomous systems, and human decision-makers must form a reasoning network capable of perceiving, interpreting, learning, adapting, and coordinating action in real time.
This does not mean replacing command.
It means strengthening it.
CombatCog is not a fantasy of uncontrolled autonomy. Its proper role is to support military operations with better perception, better reasoning, better anticipation, better planning, and stronger safeguards.
The aim is not to accelerate violence.
The aim is to improve operational understanding, reduce uncertainty, support lawful decision-making, protect civilians, and give commanders a more precise cognitive map of the environment.
Why multi-domain battlefields require distributed reasoning
Modern military operations unfold across land, sea, air, space, cyber, electromagnetic, informational, and cognitive domains.
No single sensor sees the whole.
No single platform understands the whole.
No single operator can integrate the whole in real time.
A multi-domain battlefield produces heterogeneous signals:
Movement.
Thermal signatures.
Acoustic patterns.
Electromagnetic activity.
Cyber indicators.
Terrain conditions.
Weather and microclimate changes.
Logistical flows.
Civilian presence.
Unit fatigue.
Equipment status.
Infrastructure damage.
Information operations.
Deception patterns.
The problem is not the absence of data.
The problem is the conversion of data into operational judgement.
Traditional architectures tend to move data upward toward central command and control systems. But as complexity increases, this creates latency, overload, fragility, and bottlenecks.
CombatCog proposes another logic.
Instead of treating the field as a passive source of information, it treats the operational environment as a distributed cognitive mesh.
That mesh can detect local changes, reason about local context, share relevant information, escalate uncertainty, and support higher-level command systems with interpreted signals rather than raw noise.
Sensor-agent pairs and the cognitive mesh
At the conceptual level, CombatCog-SNet can be described as a three-dimensional mesh of distributed sensor-agent pairs.
Each pair combines a sensing function with a local reasoning capability.
The sensor observes.
The reasoning agent interprets.
The network coordinates.
The command system supervises.
This is the key architectural shift.
A sensor is no longer merely a device that emits data. It becomes part of a cognitive system capable of contributing to situational awareness, threat interpretation, anomaly detection, environmental understanding, and operational adaptation.
In military scenarios, such architectures could support high-precision intelligence, surveillance, reconnaissance, command, control, and operational planning.
In non-military scenarios, the same architecture could monitor ecosystems, infrastructure, energy systems, transport networks, maritime areas, industrial facilities, or disaster-prone regions.
The specific sensors and operational constraints change.
The underlying reasoning architecture remains similar.
CombatCog and C4ISR
CombatCog should not be understood as a replacement for C4ISR.
It is better understood as a cognitive extension of it.
C4ISR systems already aim to improve situational awareness and decision-making by collecting, processing, and sharing information across operational domains.
CombatCog adds a deeper layer:
It asks how distributed AI agents can reason over sensor data before that data reaches command systems.
It asks how local intelligence can reduce overload at higher levels.
It asks how battlefield information can be structured into hypotheses, causal models, uncertainty estimates, and recommended courses of action.
It asks how autonomous and semi-autonomous systems can remain aligned with doctrine, rules of engagement, human authority, and legal constraints.
The point is not to create a battlefield that acts blindly.
The point is to create an operational environment that can reason under supervision.
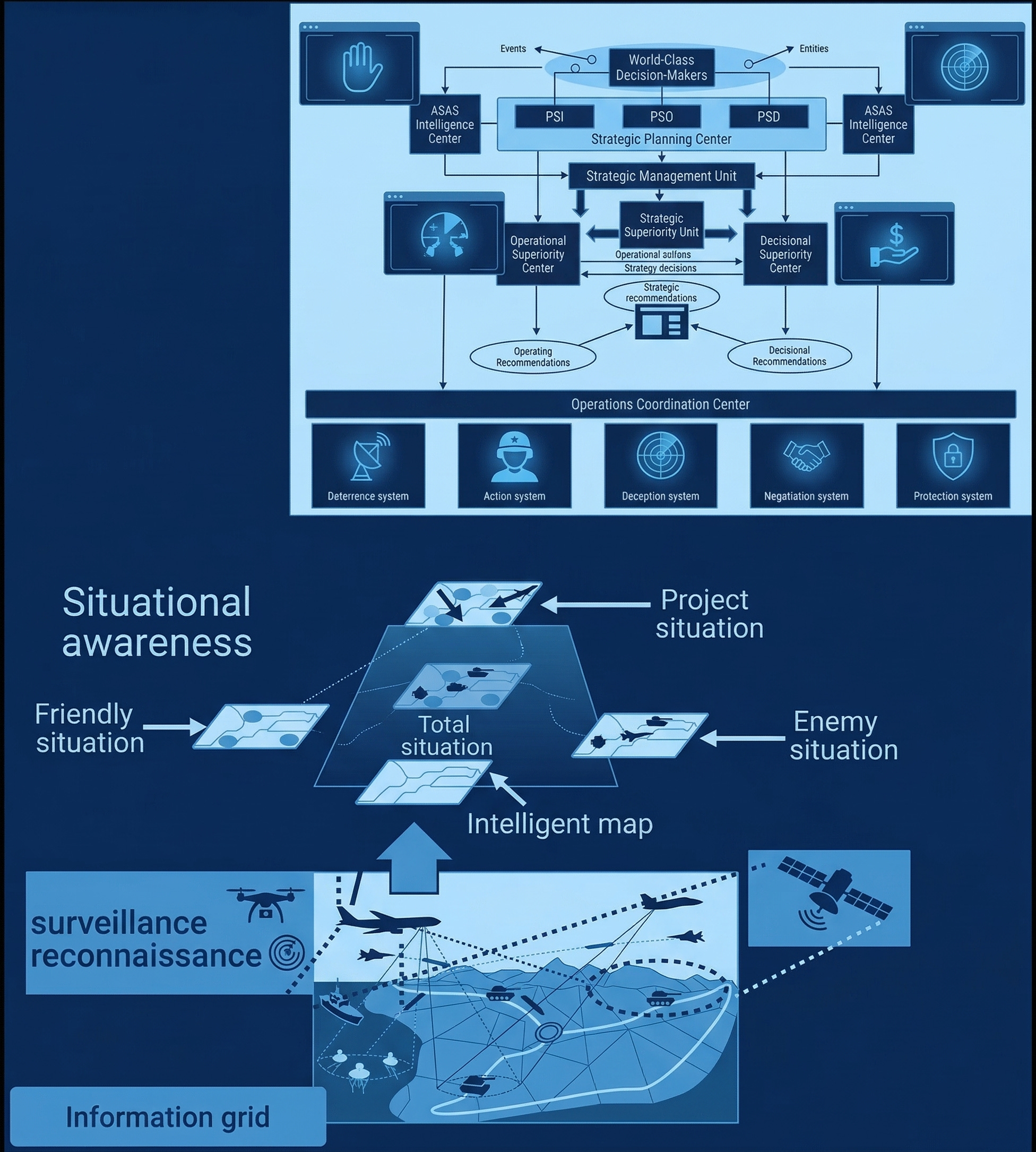
The OODA layer: from sensing to situated knowledge
CombatCog should also be understood through the logic of the OODA loop.
Observe.
Orient.
Decide.
Act.
This classical model remains valuable because it describes not only a military cycle, but a cognitive cycle.
A system must first detect and report relevant changes.
Then it must orient itself by fusing information, identifying patterns, generating hypotheses, and comparing possible interpretations of the situation.
Only after that can decision support become meaningful.
The key point is that CombatCog is not merely a sensor network.
It is a situational knowledge system.
Its purpose is to transform distributed signals into operational understanding.
At the Observe stage, distributed sensors, unmanned systems, cyber feeds, electromagnetic signals, geospatial data, and human reports contribute to the perception layer.
At the Orient stage, data fusion, pattern recognition, abductive reasoning, causal inference, and scenario modelling help transform raw information into structured hypotheses.
At the Decide stage, the system supports commanders by presenting alternative courses of action, risk estimates, collateral considerations, mission impact, confidence levels, and possible future trajectories.
At the Act stage, human and automated actions may be coordinated under doctrine, rules of engagement, legal constraints, and command authority.
The feedback loop is essential.
Every action changes the environment. Every change must be observed again. Every new observation must update the system’s understanding.
This is why CombatCog requires real-time distributed reasoning rather than centralized reporting alone.
In complex operations, the advantage does not belong simply to the actor that observes first.
It belongs to the actor that orients faster, decides better, and acts with greater precision.
Adaptive and autonomous operations under human command
Future military operations will increasingly involve autonomous systems:
Unmanned aerial systems.
Unmanned ground vehicles.
Autonomous sensors.
Robotic logistics.
Cyber defence agents.
Electronic warfare systems.
Decision-support tools.
The question is not whether autonomy will enter military operations. It already has.
The real question is how autonomy should be architected, constrained, supervised, and governed.
CombatCog must therefore be designed around a principle of bounded autonomy.
Autonomy should be used where it increases speed, resilience, precision, safety, and survivability.
But strategic judgement, political responsibility, legal accountability, and the authorization of force must remain under human command.
This is not only an ethical preference.
It is a legal and operational necessity.
Architectures such as CombatCog must therefore be developed with safeguards from the beginning:
Explainability.
Traceability.
Human authorization.
Rules of engagement.
Proportionality constraints.
Civilian protection.
Auditability.
Fail-safe mechanisms.
Mission-level supervision.
These are not external accessories.
They are part of the architecture.
The commander support environment
The ultimate objective is not to build a fully automated battlefield.
The objective is to build a commander support environment capable of integrating human judgement, machine-speed perception, distributed reasoning, and adaptive operational planning.
CombatCog must therefore remain human-commanded, doctrine-constrained, and legally accountable.
Its value is not autonomy in isolation.
Its value is the creation of a shared cognitive environment where commanders, analysts, autonomous systems, sensors, and operational units can reason over the same evolving reality.
This is a critical distinction.
A battlefield reasoning architecture should not displace responsibility upward into abstraction or downward into machines.
It should make responsibility more informed.
It should help commanders understand what is happening, what may happen next, which assumptions are fragile, which risks are emerging, and which actions are compatible with mission objectives and legal constraints.
The commander remains responsible.
CombatCog improves the cognitive environment in which command is exercised.
Civilian protection as a design requirement
One of the most important promises of sensorized, reasoning-enabled operational environments is not greater lethality.
It is greater discrimination.
A 21st-century military must be able to detect civilian presence, recognize protected objects, understand environmental conditions, evaluate collateral risk, and pause, redirect, or replan operations when the situation changes.
This is essential.
CombatCog should therefore be framed as a system for adaptive operational reasoning, not merely battlefield automation.
If the operational environment changes, the system must support commanders in understanding that change quickly.
If civilians enter an area, the system must detect, classify, escalate, and recommend operational adaptation.
If the terrain, weather, visibility, sensor reliability, or communications environment changes, the system must update its assessment.
If uncertainty becomes too high, the system must say so.
The highest-value military AI will not be the one that simply accelerates action.
It will be the one that improves judgement.
From targeting support to operational cognition
The temptation in military AI is to reduce everything to targeting.
That is a mistake.
Targeting is only one part of the operational problem.
The deeper challenge is operational cognition.
What is happening?
What does it mean?
What is changing?
What is uncertain?
What is the adversary likely to do next?
What risks are emerging?
Which assumptions are no longer valid?
Which action preserves the mission while minimizing harm?
Which operation should be paused, adapted, or abandoned?
CombatCog is valuable precisely because it shifts the focus from isolated automation to systemic reasoning.
A distributed reasoning architecture can support intelligence, planning, logistics, force protection, civilian risk assessment, autonomous system coordination, deception detection, environmental awareness, and operational adaptation.
This is not merely a technical improvement.
It is a doctrinal shift.
The battlefield becomes a cognitive environment.
Dual-use applications
The same architecture has major dual-use potential.
The difference between a military battlefield and a complex environmental or infrastructure domain is not as large as it may seem from a systems perspective.
Both involve distributed sensing.
Both involve uncertainty.
Both involve changing conditions.
Both involve risk.
Both involve multiple actors.
Both require early warning.
Both require decision-support under time pressure.
Both benefit from adaptive reasoning.
Consider environmental monitoring.
A lake, wetland, forest, coastal lagoon, river basin, or marine ecosystem can be instrumented with distributed sensors and reasoning agents. The system can monitor chemical concentrations, detect pollution, infer possible sources of contamination, identify dangerous residues or obstacles, observe species behavior, detect ecological imbalance, and generate early warnings.
The same logic can apply to large ecosystems such as the Amazon rainforest, protected wetlands such as Doñana, or fragile marine environments such as the Mar Menor.
The key is not only to collect measurements.
The key is to reason over them.
What is normal?
What is anomalous?
What is changing?
What causal pattern might explain the change?
What intervention is required?
What risk emerges if no action is taken?
Critical infrastructure and predictive maintenance
The same approach can also be applied to critical infrastructure.
Energy grids.
Pipelines.
Rail networks.
Ports.
Airports.
Water systems.
Bridges.
Industrial plants.
Telecommunications infrastructure.
Multimodal transport systems.
These are not static assets. They are dynamic socio-technical environments.
A distributed reasoning architecture could support continuous monitoring, early anomaly detection, predictive maintenance, risk scoring, operational prioritization, and coordinated response.
In this context, CombatCog becomes more than a military concept.
It becomes a general model for reasoning in complex, sensorized environments.
The defence application may be the most demanding.
But the underlying architecture is broader.
The hard problem is not sensing. It is reasoning.
The most important challenge is not the deployment of sensors.
Sensors will become smaller, cheaper, more numerous, more specialized, and more connected.
The hard problem is reasoning.
How do we convert signals into knowledge?
How do we reason locally and globally at the same time?
How do we coordinate distributed agents without losing command coherence?
How do we manage uncertainty?
How do we avoid false confidence?
How do we preserve human control?
How do we explain decisions?
How do we adapt in real time?
How do we prevent the system from becoming an opaque autonomous bureaucracy?
That is where BioNeuroCognitive AI becomes relevant.
It offers a way of thinking about distributed perception, adaptive learning, cognitive modelling, uncertainty management, and human-machine cooperation in systems that must operate under pressure.
Toward real-time distributed complex reasoning
The future of intelligent operations will depend on three converging layers.
First, next-generation microsensors capable of observing complex environments across physical, digital, biological, and electromagnetic dimensions.
Second, pervasive communication networks capable of maintaining resilient information flows across distributed systems.
Third, hard and soft reasoning entities capable of interpreting data, generating hypotheses, adapting to change, and supporting human decision-making in real time.
This third layer is the decisive one.
Without reasoning, sensorization creates overload.
Without governance, autonomy creates risk.
Without human command, distributed intelligence can become strategically dangerous.
CombatCog must therefore be understood as a controlled cognitive architecture for complex environments, not as an unconstrained autonomy system.
Its purpose is to help humans and machines operate together in environments too complex for either to manage alone.
SITAWIM, SITAWAR and the evolution of situational awareness
A useful way to frame CombatCog is through the distinction between situational awareness, situational knowledge, and situational reasoning.
Situational awareness tells us what is happening.
Situational knowledge helps us understand what it means.
Situational reasoning helps us infer what may happen next and what should be done.
This is where concepts such as SITAWIM and SITAWAR become relevant as modelling references.
They point toward systems that do not merely display information, but structure it into operational knowledge.
The aim is not another dashboard.
The aim is a reasoning environment where information fusion, data mining, anomaly detection, visualization, planning, decision-support, auto-response, and feedback are part of the same cognitive cycle.
CombatCog extends this logic into distributed environments.
It does not assume that all intelligence must be centralized.
It allows perception, interpretation, and reasoning to occur at multiple levels of the operational architecture.
At the edge.
At the platform level.
At the unit level.
At the C4ISR layer.
At the commander support environment.
At the strategic decision layer.
This layered reasoning model is essential for future operations, because complexity cannot be solved only by sending more information to the center.
Sometimes the system must reason where the information appears.
The dual-use meaning of CombatCog
The term CombatCog may come from the defence domain, but the architecture is not limited to defence.
Its broader meaning is the design of cognitive operational environments.
A cognitive operational environment is one in which sensors, agents, humans, infrastructures, and decision systems continuously exchange information and reasoning.
In military operations, this supports adaptive manoeuvre, force protection, civilian protection, and mission planning.
In environmental systems, it supports early warning, ecological balance, pollution detection, and resource protection.
In critical infrastructure, it supports resilience, predictive maintenance, emergency response, and continuity of essential services.
In disaster management, it supports anticipation, coordination, and rapid response.
In each case, the same principle applies.
Distributed sensing is not enough.
Distributed reasoning is the decisive layer.
The battlefield as a cognitive system
The sensorized multi-domain battlefield is becoming a distributed information environment.
The next step is to make it a distributed reasoning environment.
That transition must be handled carefully.
It must be technically rigorous.
It must be legally constrained.
It must be ethically serious.
It must be operationally useful.
And it must remain accountable to human command.
CombatCog is our working name for this line of research.
It explores how real-time distributed complex reasoning can support adaptive and autonomous operations in defence, while also enabling dual-use applications in environmental protection, critical infrastructure monitoring, and predictive risk management.
The core idea is simple.
The future will not belong only to those who collect more data.
It will belong to those who can reason better across distributed systems.
In defence, that means faster awareness, better protection, more adaptive operations, and stronger safeguards.
In civilian domains, it means earlier warnings, better environmental stewardship, more resilient infrastructure, and smarter collective response.
The intelligent battlefield is only one expression of a larger transformation.
We are moving from sensorized environments to cognitive environments.
And in that transition, the decisive architecture will not be the one that merely sees.
It will be the one that understands.